DREAMS Laboratory

The Distributed Robotic Exploration and Mapping Systems (DREAMS) Laboratory specializes in the research and development of autonomous robotic systems and cyber-physical twins, for advanced mapping, sampling, and analysis in diverse environments — terrestrial, aquatic, and extraterrestrial. DREAMS Lab is composed of a multidisciplinary team of researchers in engineering and science, passionate about pushing the boundaries of exploration and discovery.
As part of Arizona State University, the DREAMS Lab is affiliated with the School of Earth and Space Exploration, the Global Futures Laboratory, and the Center for Global Discovery and Conservation Science (GDCS). Located in the heart of innovation at ASU's Walton Center for Planetary Health (WCPH), the lab welcomes everyone interested in pioneering research and scholarship.
Focus Areas
Aquatic
Robotic boats and autonomous underwater vehicles for limnological, littoral, and coastal mapping and sampling of the water column, and the benthos.
Projects
Collaborative Robotic Aquatic Laboratory (CoRAL)









Terrestrial
Projects span geomorphology, drylands ecology, and precision agriculture. Systems and algorithms operate as a network of autonomous ground and aerial vehicles, and ground based static sensors, enabled by cyber-physical twins.
Projects
Terrestrial Robotic Observing Network (TRON)




QuAD-FLIP: Quadrotor Aerial Delivery with Flipping for Limited-access Inspection and Probing



Planetary
Surface feature mapping, vision systems, and digital twins, with focus on Mars and Moon.
Projects
Sub-centimeter Resolution Lunar Digital Twin for Collaborative and Immersive Mission Planning (NASA STTR)



Cyber-Physical Twins
Digital and Physical twins leveraging cyber-physical systems, for simulation studies, dynamical analysis, and predictive modeling of environmental processes.
Projects
DeepGIS decision support system


Virtual Shake Robot and ShakeBot




Art and Outreach
Extending innovations from research activities, a creative outlet for DREAMS lab members.
Projects
The Journey Aquatic (lead artist Mark Dill)






People
| Photo | Name | Position | Affiliation |
|---|---|---|---|
|
|
Jnaneshwar Das | Director (faculty) | ASU School of Earth and Space Exploration |

|
Zhiang Chen | Affiliate Postdoctoral Scholar | California Institute of Technology |

|
Akshay Mahalle | Computational Geomorphology Research Aide | ASU Fulton Schools of Engineering |

|
Deep Rodge | Perception Research Aide | ASU Fulton Schools of Engineering |

|
Yi-Hau Lai | Robotics and Perception Research Aide | ASU Fulton Schools of Engineering |

|
Fenil Bardoliya | Computer Vision Research Aide | ASU Fulton Schools of Engineering |

|
Adithya Yerramsetty | Computer Vision Research Aide | ASU Fulton Schools of Engineering |

|
Swaraj Akurathi | Field Robotics Research Aide | ASU Fulton Schools of Engineering |

|
Saransh Jain | Affiliate Researcher | Argonne National Laboratory |

|
Jack Haehl | Extended Reality Developer | Digital Discovery Initiative |

|
Pavan Kalyan Majjiga | Research Volunteer | Fulton Schools of Engineering |

|
Andrea Schoonover | Research Volunteer | ASU Fulton Schools of Engineering |
|
Rodney Staggers Jr. | Ph.D. student | ASU School of Earth and Space Exploration |
Assets
| Name | Description | Photo | Project |
|---|---|---|---|
| R/V Karin Valentine (robotic boat) | R/V Karin Valentine is an autonomous surface vehicle (ASV) or a robotic boat, capable of water column sampling, bathymetric mapping, and physical sample return from water bodies such as lakes and marinas. |
|
Collaborative Robotic Aquatic Laboratory (CoRAL) |
| uDrone autonomous underwater vehicle (AUV) | uDrone is a quadrotor format agile autonomous underwater vehicle (AUV), designed for operating solo, or in tandem with R/V Karin Valentine autonomous surface vehicle (ASV), that serves as a base ship for heterogeneous operations. uDrone has been designed for persistent coral reef monitoring and geological bathymetric mapping. |
|
Collaborative Robotic Aquatic Laboratory (CoRAL) |
| Rocky II hexrotor drone | Rocky II is a hexrotor drone for searching and mapping of fragile geologic features such as precariously balanced rocks. Rocky II has also been used for multi-spectral imaging for rocky fault scarps. |
|
Terrestrial Robotic Observing Network (TRON) |
| EarthPod Sensor Probe | Designed to operate solo or as a sensor network, EarthPod is a sensor probe that can do weather and soil parameter sampling for time series studies, EarthPod when networked, can help do optimal interpolation of scalar fields such as temperature, for environmental monitoring. |
|
Terrestrial Robotic Observing Network (TRON) |
| High-altitude balloon payload | Lightweight, low SWaP (< 1.5 kg) high-altitude balloon payload for aerobiological sampling. The innovation incorporates the latest drone flight control technologies and custom environmental sensing hardware. A ground-tested prototype for the payload has been designed |

|
High-altitude balloon payload with attitude control and predictive scheduling, for environmental monitoring |
| EarthRover | 26” Schwinn adult tricycle frame, augmented with a front electric motor for traction, a steering system, rear aerodynamic solar panel assembly, a rear mast for avionics, sensing, and compute payloads. The vehicle’s large (26”) wheels and low weight (65 kg), enables stability and long range (up to 50 km a day with solar), and is capable of GPS-enabled vision based autonomous navigation on paved or unpaved paths. The vehicle can execute repeatable paths that are either learned by the system from experimental drives by a rider, or through specified or optimized mission plans. |

|
EarthRover: Affordable and Sustainable Mobility Autonomy for 4D Environmental Monitoring |
| Flippy quadrotor drone | Lightweight and agile quadrotor drone with 45cm diameter, with onboard gripper and ARM compute, capable of acrobatic maneuvers. |
|
QuAD-FLIP: Quadrotor Aerial Delivery with Flipping for Limited-access Inspection and Probing |
Publications
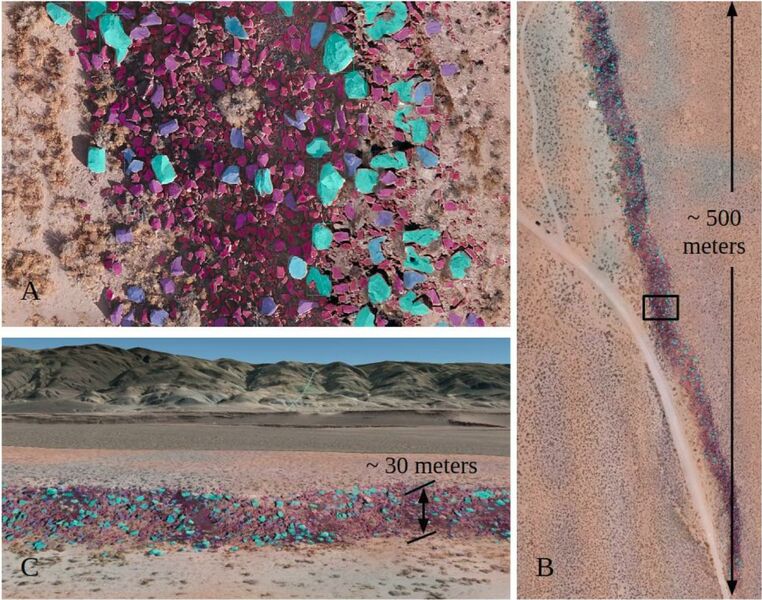
(2024). Quantifying and analysing rock trait distributions of rocky fault scarps using deep learning . Access
(2024). Virtual Shake Robot: Simulating Dynamics of Precariously Balanced Rocks for Overturning and Large-displacement Processes . Access
(2023). A Survey of Decision-Theoretic Approaches for Robotic Environmental Monitoring . Access
(2021). Terrain-Relative Diver Following with Autonomous Underwater Vehicle for Coral Reef Mapping . Access
(2021). OpenUAV Cloud Testbed: a Collaborative Design Studio for Field Robotics . Access
(2020). Geomorphological Analysis Using Unpiloted Aircraft Systems, Structure from Motion, and Deep Learning . Access
(2018). Robust Fruit Counting: Combining Deep Learning, Tracking, and Structure from Motion . Access
(2017). Counting Apples and Oranges With Deep Learning: A Data-Driven Approach . Access
(2015). Data-driven robotic sampling for marine ecosystem monitoring . Access
(2015). Devices, systems, and methods for automated monitoring enabling precision agriculture . Access
(2012). Coordinated sampling of dynamic oceanographic features with underwater vehicles and drifters . Access
(1). Google Scholar . Access
Sponsors and Partners



